Physical AI Has a Body Now. Here’s What That Actually Means
AI used to live behind a screen. It answered questions, wrote emails, and generated images. Useful, sure. But fundamentally passive.
Now it’s stepping out. Physical AI doesn’t just think. It moves, grabs, drives, and acts in the real world. And the gap between science fiction and your neighborhood is closing faster than most people realize.
A PwC study released in March 2026 projects the global physical AI market will hit approximately €430 billion (about $500 billion) by 2030. That’s not a distant forecast. That’s four years away.
So what exactly is this technology, how does it work, and should you be excited or nervous? Probably both.
What Physical AI Actually Is
Physical AI means artificial intelligence embedded in machines that can perceive, decide, and act in real-world environments. It’s not a chatbot stuffed into a metal shell.
Robotic systems engineer Zhengyang Kris Weng from Sunday put it plainly to CNET: “Physical AI is definitely not just a ChatGPT inside a robot.”
The difference matters enormously. A chatbot might confidently cite a source that doesn’t exist. A delivery robot that misjudges distance by a few inches could knock someone over. The stakes are completely different.
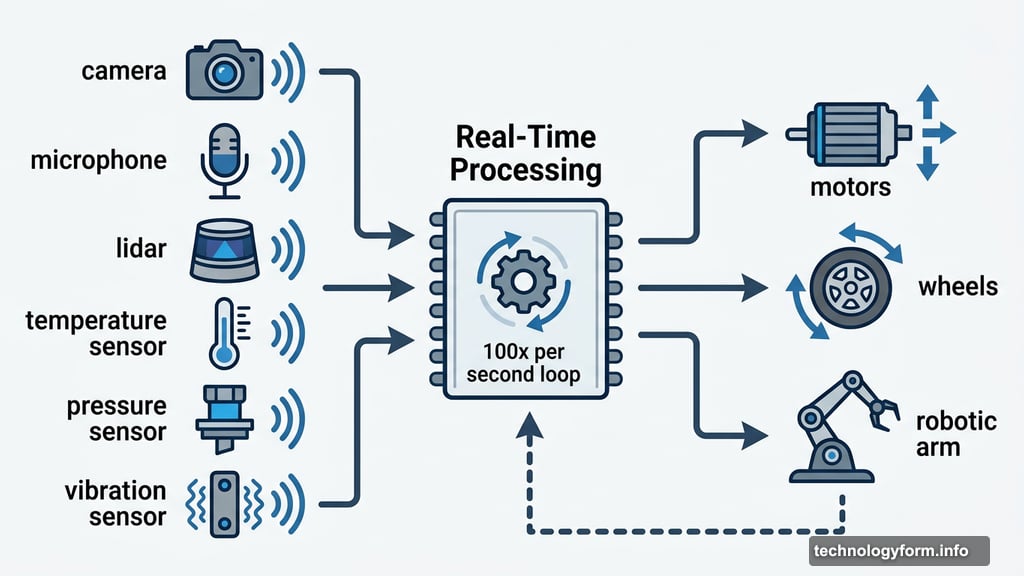
These machines collect information from the physical world using cameras, microphones, lidar (laser-based distance sensors), and environmental sensors measuring temperature, pressure, and vibration. Then they process all that data in real time and send commands to motors, wheels, and robotic arms. The whole loop runs hundreds of times per second.
Perception, Decision, Action — All at Once
Here’s what makes physical AI genuinely hard to build. The world is messy.
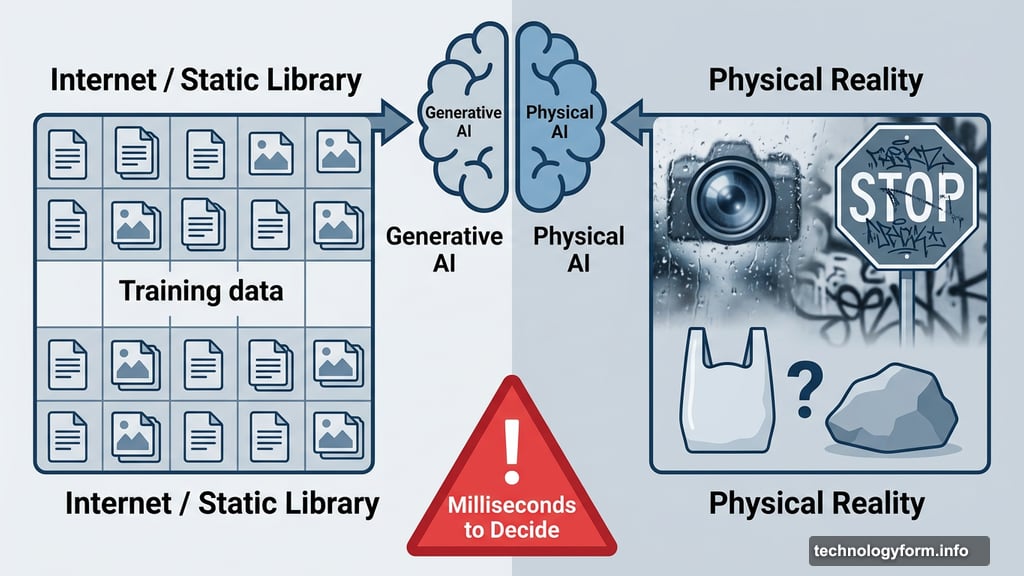
Generative AI trains on the internet, which is essentially a massive, static library. Physical AI trains on reality, and reality doesn’t cooperate. Rain blurs camera lenses. Stop signs get covered in graffiti. Plastic bags blow across roads and look briefly like rocks.
The system has to constantly ask: is that a child’s backpack or a mailbox? Is that shadow harmless or something to brake for? And it needs the answer in milliseconds.
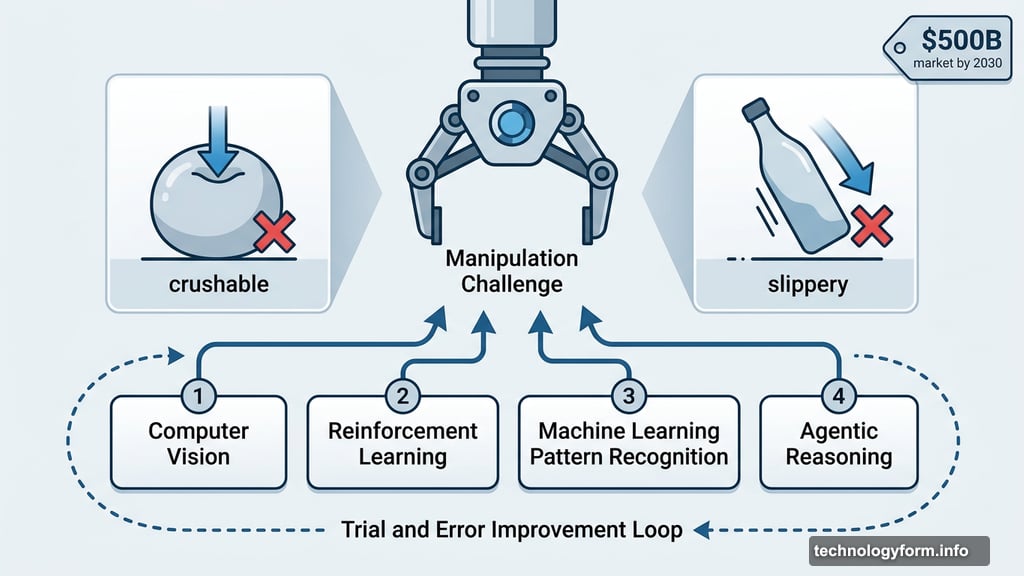
To handle this, physical AI systems combine several different approaches. Computer vision analyzes camera feeds. Machine learning models recognize patterns and predict what happens next. Reinforcement learning lets the system improve through trial and error. Some newer systems also use agentic reasoning to plan multiple steps ahead.
But the real challenge isn’t avoiding obstacles. That part is relatively manageable. Teaching a robot to manipulate objects, to pick up something soft without crushing it or something slippery without dropping it, is far harder.
“There are still a lot of very complicated contacts, frictions that are really hard to simulate and really hard to make realistic for robots to understand the difference between a simulation and the real world,” Weng told CNET.
Physical AI You’ve Already Seen
Some forms of this technology aren’t coming soon. They’re already here.
Self-driving vehicles are probably the most visible example. Waymo’s robotaxis cruise through San Francisco. Tesla’s Autopilot uses AI models to interpret sensor data and control vehicles continuously. Weng makes an interesting observation about these systems: “They are out there on the road, collecting data. And that’s a very good example of having data feeding into a model that helps to generate more data. This is what we call a data flywheel.”
Industrial robots are another major category. Amazon’s Vulcan robot uses AI to identify, sort, and move warehouse packages. Surgical robotics like the da Vinci system assist doctors with precision movements that human hands can’t consistently replicate. Even your Roomba qualifies. Modern versions use visual simultaneous localization and mapping (V-SLAM) to build a mental floor plan rather than just bouncing around randomly.
Beyond individual machines, physical AI is reshaping entire environments. Singapore operates a digital twin, a virtual 1:1 replica of the city, to run planning simulations. Toyota’s Woven City project in Japan is experimenting with how physical AI could eventually help manage urban infrastructure.
Still, most current systems remain narrowly focused. A warehouse robot that excels at sorting boxes would be completely lost in a grocery store. A self-driving system that handles highways confidently might struggle with construction zones or unpredictable human behavior.
Why Training Physical AI Costs So Much More
Training a large language model is expensive, but the process is relatively straightforward. You feed it text, run the compute, and iterate.
Training physical AI is a different problem entirely. You actually have to move the machine through the world. You need it to encounter rain, unexpected obstacles, and edge cases that don’t appear in any existing dataset. Collecting that data is slow because the machine has to physically experience situations in real time.
To reduce these costs, developers use digital twin simulations and world foundation models to generate synthetic training data. These systems create hyper-realistic virtual environments where robots can practice handling physics, rare emergencies, and unusual scenarios without risking real-world consequences.
But simulations still have significant gaps. Friction, contact physics, and material interactions remain difficult to model accurately enough for robots to fully trust what they’ve learned in a virtual environment.
The Safety Problem Nobody Has Solved Yet
This is where enthusiasm needs some honest tempering.
The moment AI leaves a screen, reliability becomes everything. Software can be patched overnight. A mechanical failure or vehicle collision has consequences that no update can undo.
Weng is direct about the current state: “Reliability is probably overlooked a lot of times. It could still be unsafe and making a lot of decisions, especially under uncertainty.”
Most systems handle common scenarios well. The real test is edge cases. An overturned truck blocking a road. A deer darting into headlights. A situation the training data never covered.
“Once you disturb any scenario around it, it could feel that ‘Hey, I haven’t really seen this before,’ and it doesn’t know what to do,” Weng told CNET. “And it might just freak out.”
The numbers reinforce this concern. A system with 99% reliability sounds impressive until you think about it differently. That means one failure per hundred actions. For a warehouse robot sorting packages, that’s occasionally annoying. For a surgical system or self-driving vehicle, that’s a serious problem.
“We’re kind of still far from having ideally layered protection and safeguards,” Weng says. Questions about safety standards and accountability are genuinely unsettled. Who’s responsible when a physical AI system causes harm? How reliable is reliable enough before deployment? The industry doesn’t have clean answers yet.
Where This Technology Is Headed
Researchers are increasingly focused on what’s called embodied AI, where machines learn by physically interacting with the world rather than by processing static data. The core idea is that intelligence becomes more capable when it’s grounded in real experience.
The near-term applications being explored include robots for elder care, autonomous systems for disaster response, agricultural machines that monitor and manage crops, and warehouses with dramatically higher automation levels.
Weng’s prediction for where robots show up first is practical and grounded: “Most likely, robots will show up in a lot of places where tasks are repetitive and where environments are somewhat structured.”
That means factories before hospitals. Warehouses before homes. Controlled environments before chaotic ones.
The fully autonomous humanoid robot that handles any situation in any setting is still a research problem, not a product roadmap. But the narrower, focused versions of physical AI are already operating in real conditions, collecting real data, and getting better through exactly the kind of data flywheel Weng describes.
AI started as something you typed to. Now it’s something that drives your packages across a warehouse floor, assists in operating rooms, and maps your apartment while you sleep. The ghost in the machine has started finding its footing in the physical world. What it does once it finds its balance is the question worth watching closely.